Headlight AI Limited
BCIS LiDAR Survey (2020)

Headlight AI Limited
Wessex Water has in its management a sewer network of 35,000km, of which approximately 10% have a diameter of >900mm. These represent some of the most critical sewers due to their ability to carry larger volumes of wastewater, and therefore must be regularly inspected and maintained. The Bournemouth Coastal Interceptor Sewer (BCIS) is one of these critical assets under Wessex Water’s management serving a population of around 34,500. Its concrete structure was constructed between 1964 and 1971 with an internal diameter of 1,800mm with a maximum flow rate of 650 l/s, and receiving discharges from two rising mains, however due to its location and its surrounding geology it is particularly vulnerable to water infiltration and biogenic corrosion from hydrogen sulphide.
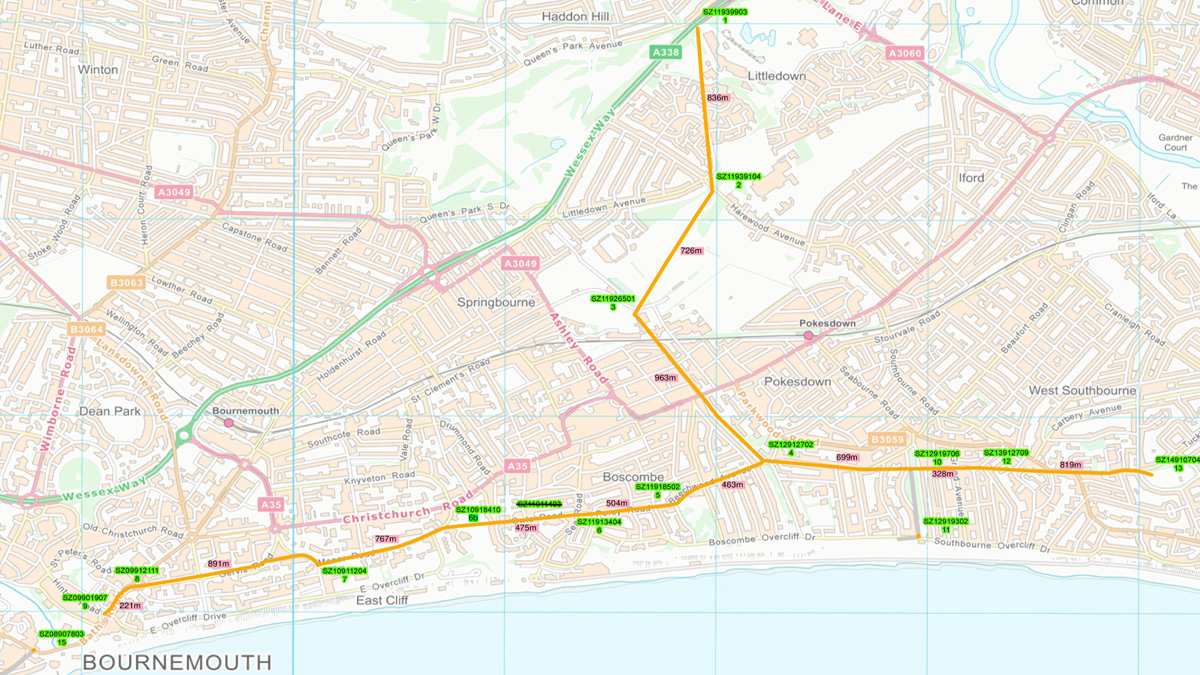
A map showing the location of the BCIS and various shafts – Courtesy of Wessex Water
A need for non-person entry LiDAR surveys
The BCIS is regularly surveyed by Wessex Water to ensure its effective operation. Surveying methods have included CCTV condition assessments, laser profiling surveys, and calibrated LiDAR surveys. The latter being the most informative, and a requirement for structural assessment of specific sections of the BCIS; the renovation of which has previously been published by Wessex Water. However, this traditional surveying method requires person entry and traversing of the sewer by a team of operatives due to the need for calibration targets and accurate registration of the 3D point cloud. Hence, this method requires substantial assessment and planning in order to accommodate the higher health and safety risks imposed on workers.
Wessex Water’s priority in the management of its sewers is health and safety. In many cases access shafts into sewers can be located every 1000m or so, which is concerning if operatives are to enter such dangerous environments. Therefore person entry into the confined spaces of a live sewer, such as the BCIS, are to be minimised or avoided wherever possible to ensure enhanced process safety. Consequently, Wessex Water searched the market for a partner who could provide 3D modelling and asset location in the x, y, and z axes that avoids person entry into a live sewer, could cope with the extreme conditions of the environment, and overcome the semi-turbulent flow typically found within large diameter sewers.
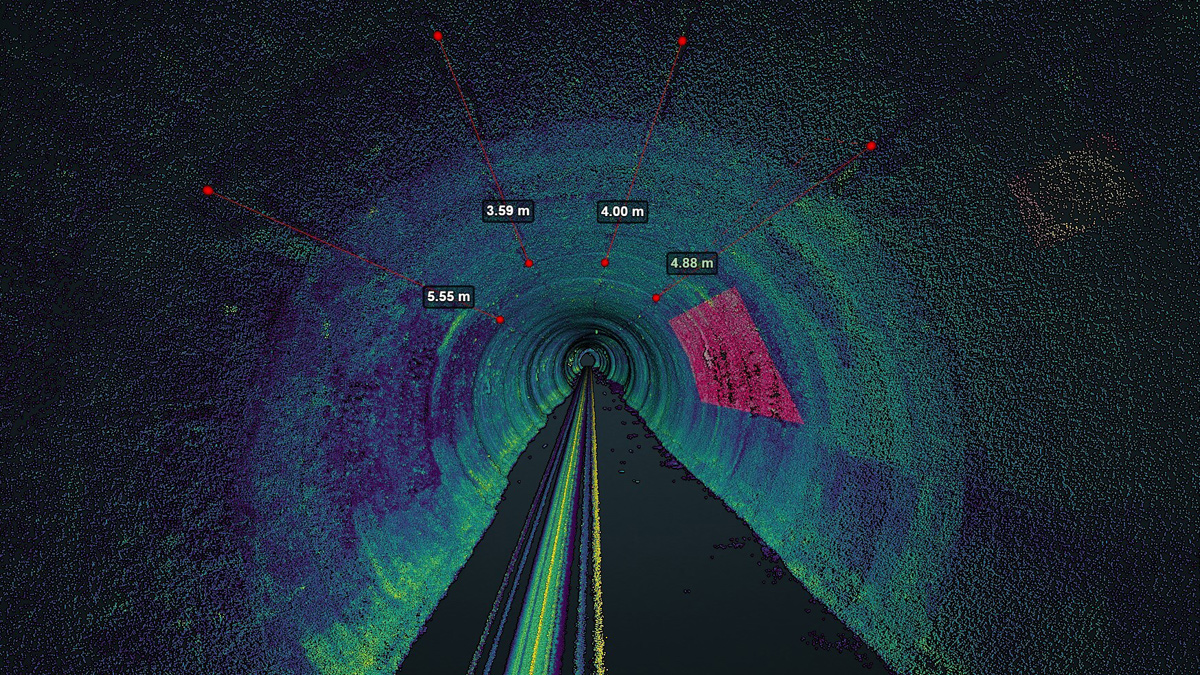
Images of processed point clouds produced by Headlight AI using its earlier versions of the product on wheeled robots in St James tunnel in Bermondsey, London – Courtesy of Headlight AI
Development and testing of Telesto hardware and software
Headlight AI is a technology company developing sensing, mapping and data processing solutions for extreme environments. It focuses primarily on solutions for subterranean infrastructure, such as tunnels, sewers, and culverts, where GNSS or GPS signal is denied, which makes accurate localisation challenging. Headlight AI integrates various imaging and sensing technologies for use in underground environments and develops proprietary software and artificial intelligence (AI) models to process and analyse this multi-sensor data. Over the last 2 years it has developed a multi-sensor system called Telesto, which has been through multiple iterations of development and testing over this time frame. The latest version utilises LiDAR, cameras, lights, inertial sensors, and proprietary software to capture and process GBs of data per minute as it is collected.
Early versions of the technology addressed simple motion on wheeled robotic platforms in tunnels, however the technology evolved substantially over the course of 2019 and a prototype version was tested in several live sewer environments (managed by Wessex Water) on a floating platform, supplied and operated by Bright Innovations Group (Bright IG). The advantage of this approach is that the floating platform is operated via a winch and capstan system in a safe environment above ground. As Telesto is a battery-operated system, there is no need for an umbilical electrical power supply back to the surface, hence the floating platform has the capabilities to survey over 4,000m at a time, with options to readily swap out the battery when needed.
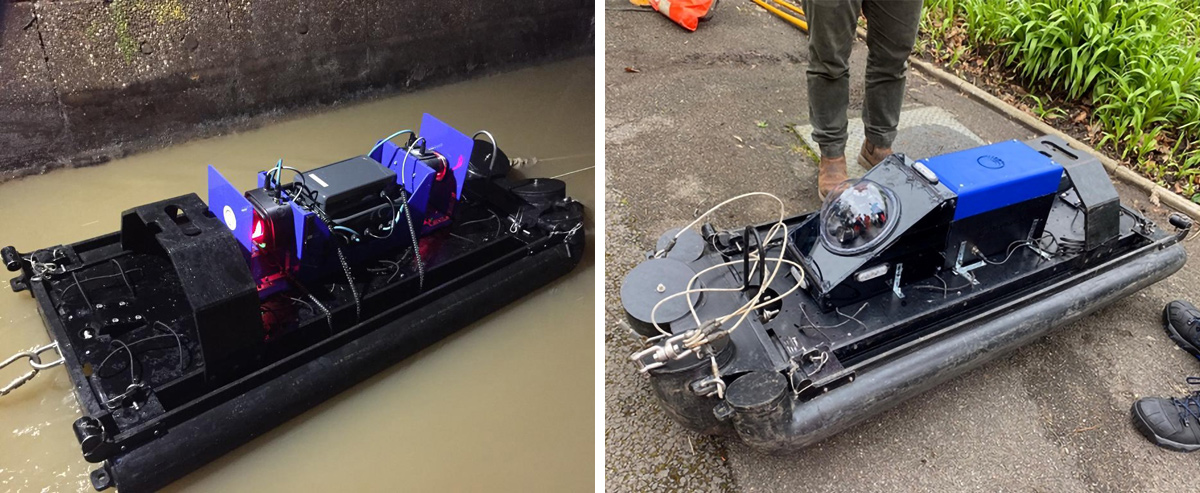
(left) Early prototype version of Telesto on the floating platform – Courtesy of Bright IG, and (right) a later prototype – Courtesy of Headlight AI
Multi-sensor data collection and processing
The laser scanner spins 360° and continually captures data points in the sewer at a rate of 30Hz using light detection and ranging (LiDAR), whilst specially selected low-light cameras capture images from a variety of angles so the structure can be thoroughly assessed from multiple views. Simultaneously, a suite of calibrated sensors collects motion data, and pre-processing algorithms carefully store, monitor, and pre-process the data on Telesto’s inbuilt CPU. This process of simultaneous localisation and mapping (SLAM) is being investigated for robotics across other applications, where access to GNSS or GPS is denied or limited. However, to the best of our knowledge it had not been successfully demonstrated in sewers with semi-turbulent flow, such as the BCIS; therefore, this was a world-first demonstration in a large diameter sewer.
Whilst the software is vital for the performance of the product and required significant engineering time to develop, there remained several challenges to overcome for the development of the hardware, which needed to deal with the harsh environment of the sewer whilst being relatively lightweight and compact. Telesto also needed to be powered continuously for at least 3 hours during data collection to ensure it was efficient from an operational perspective. Achieving these features required multiple iterations of design and testing. The input from both Wessex Water and Bright IG from an end user and operational point of view was pivotal to the development of the system.

Render of the latest version of Telesto – Industrial design and image courtesy of Goodwin Hartshorn
Once Telesto was manufactured and tested by the team at Headlight AI, it was secured to the floating platform and safely deployed by Bright IG via the winch and capstan system. The process required four operatives, two at the upstream end of the sewer and another two at the downstream end of the sewer. The system was always checked wirelessly, using the Telesto control application, prior to the boat traversing the sewer to ensure all systems were running correctly. It took 2 weeks to collect the data across 7,692m of the BCIS, including 13 shaft scans at various positions and depths along the sewer.
Data visualisation and analysis
Headlight AI subsequently used the Telesto processing software to further process the multi-sensor data. The resulting 3D point clouds can be visualised via a web-based platform supplied by Headlight AI or via a range of commercially available point cloud viewing software. Structural deformations and a range of defects can be detected from the point cloud either by manually reviewing the information, or using AI, which Headlight AI has developed to automatically detect anomalies and points of interest with the large datasets. This latter approach has the advantage of speed and the ability to detect patterns from the information that may not be visible to a human eye, hence the ability to detect issues in advance of them becoming larger and more expensive problems.
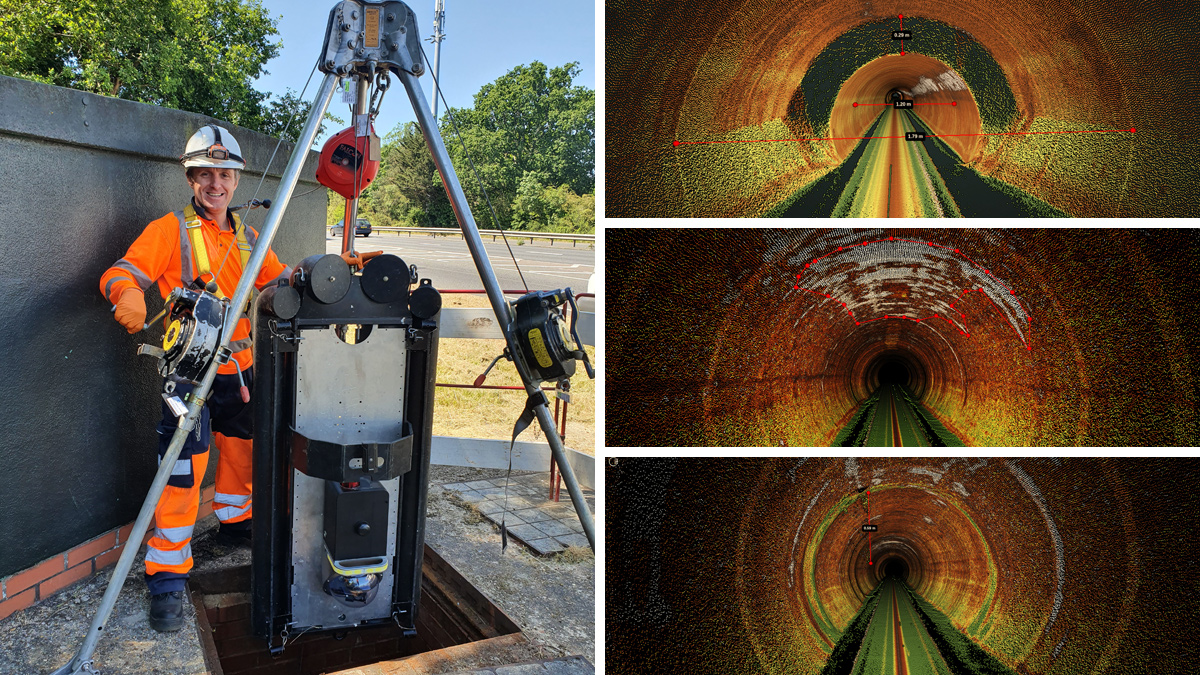
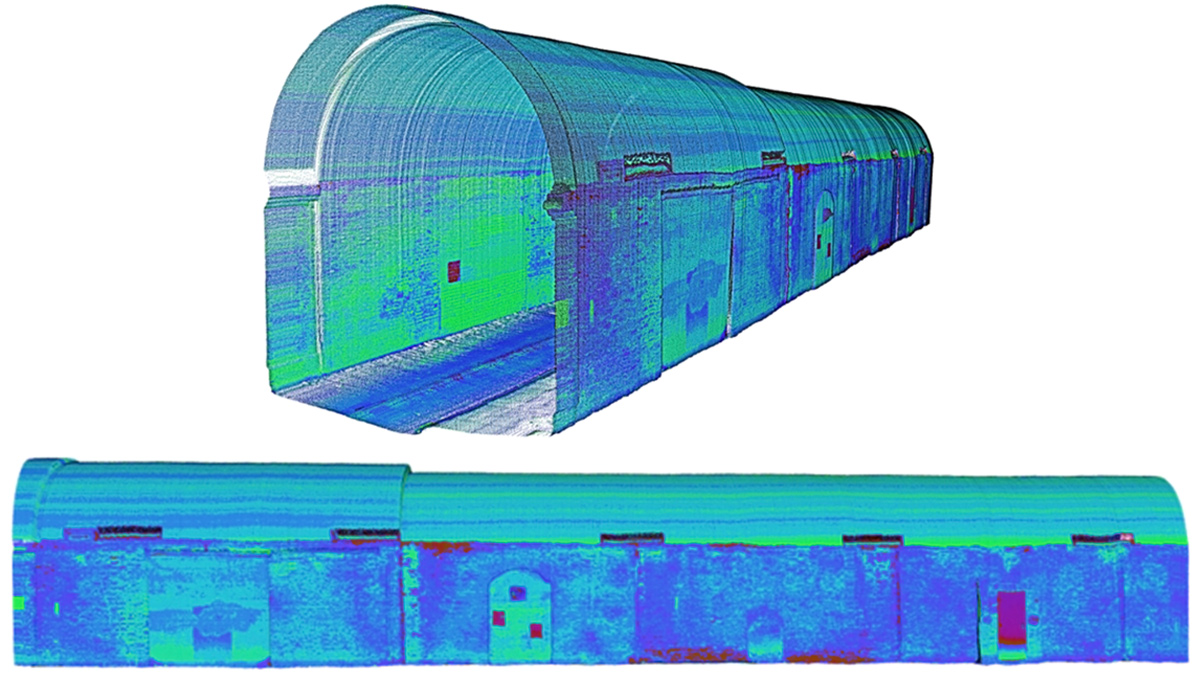
(left) Photograph of deployment of the system during the data collection phase of the BCIS survey and (right) examples of 3D point cloud produced from the trials – Courtesy of Headlight AI
The distances between the shafts varied from 221m to 963m, this combined with the turning of the sewer and distortions along its path added significant complexity to localisation, which can only be verified using accurate GPS readings at each of the shaft positions. For this reason, the project offered an excellent opportunity to test the algorithms across a wide range of situations that are commonly encountered across other major subterranean sewers, culverts, and tunnels. Furthermore, certain sections of the BCIS have previously been surveyed using traditional surveying methods with calibration targets. The results could therefore be compared against previous surveys conducted by Wessex Water.
Headlight AI spent several weeks to process and conduct quality checks of all the data, which for the sewer alone consisted of over 250 GB of data and over 2 billion points. At the time of writing (June 2020), the final report and results are still being collated for submission to Wessex Water by Headlight AI. Initial findings are consistent with previous surveys conducted, although the overall results still require consideration by Wessex Water to establish whether this new surveying method can completely replace the need for high cost, calibrated surveys that involve person entry.

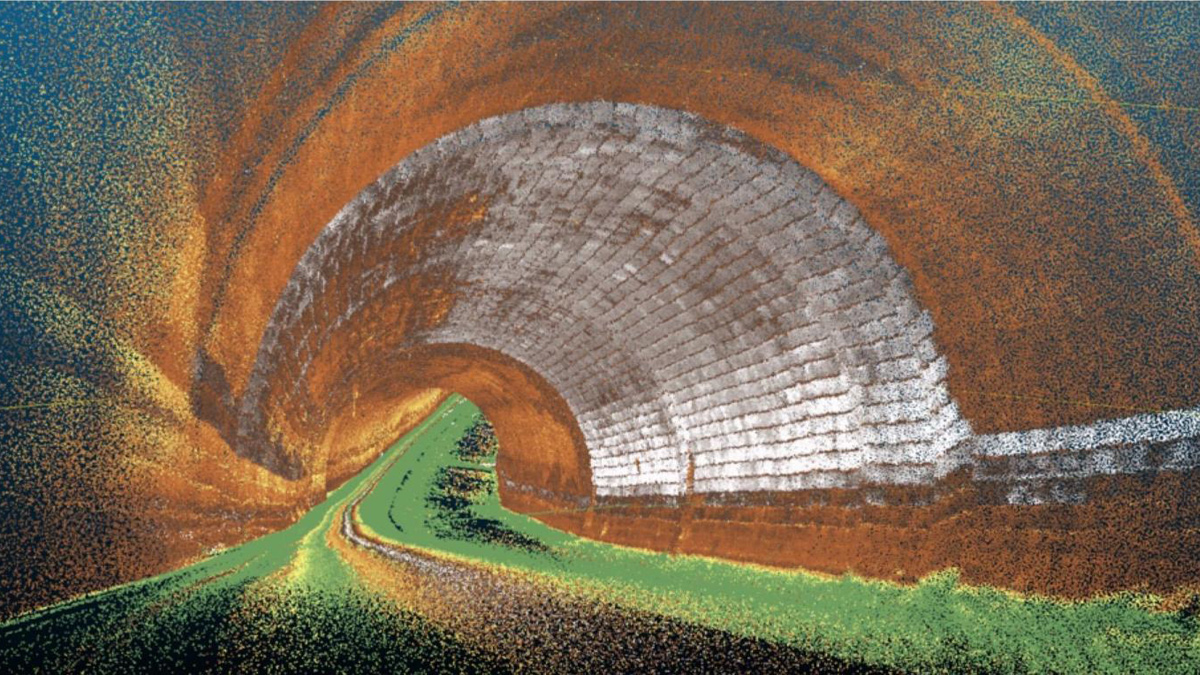
3D point cloud showing a change in the diameter, where another section of lining was required to repair the BCIS. The different colours represent different surface or material effects – Courtesy of Headlight AI
Revisiting the CIPP lining and identifying different surface and material properties
Wessex Water were also interested in revisiting the GRP segmental tunnel lining which was previously installed in a section between shafts 13 and 10. The point cloud and images captured at multiple angles, e.g. at 9, 12 and 3 o’clock configurations, clearly show this transition along with the associated change in diameter at approximately 930m from Shaft 10 towards 13. A similar repair was carried out between Shaft 5 and 6, and this has also been successfully mapped in 3D using Telesto, showing how the new surveying system can be used to monitor repair and remediation works as well as the sewer itself.
A variety of materials can be separated in the point cloud using a combination of traditional and deep learning algorithms. These techniques were used to determine the presence of various surface types and materials during the project. Further work remains on-going to identify calcification and other deposits across the structure. This can eventually be used to automate some aspects of the analysis and provide an objective method to distinguish between different surface types and materials. The AI models being developed will only become more accurate as the software processes larger amounts of varying data.

(left) Section of the sewer showing calcification and degradation and (right) the 3D point cloud at the same position – Courtesy of Headlight AI
Conclusions and future work
The project has enabled approximately 8km of the Bournemouth CIS to be mapped in 3D without the need of operatives to traverse the sewer. It has therefore shown that Telesto has high potential to improve the health and safety of sewer inspections across the water and wastewater industry. The novel technique has been shown to be similar in cost to laser profiling and CCTV surveys, whilst being significantly more informative. By combining the information with terrestrial surveys and shaft scans at the shaft positions, the system has allowed Wessex Water to map the key sections of the sewer in x, y, and z. Further work remains ongoing by Headlight AI and Wessex Water to assess the condition of the BCIS. Over time, further benefits will be the ability to compare the 3D structure over time (4D analysis) and conduct change detection. This will enhance predictive maintenance and allow Wessex Water to make more informed decisions regarding both operational and capital expenditure.
Headlight AI is now further developing Telesto hardware and software to enhance its offering and further automate data processing and analysis. Whilst Telesto has been tested in structures of 900mm diameter and greater, Headlight AI are already investigating methods to miniaturise the technology so that it can be used in smaller diameter pipes, which are more commonplace and remain inaccessible for traditional surveying methods. It is also further enhancing its AI models to detect more classes of defects and its platform to assist both utilities and utility contractors with their reporting of this critical information.
Key people involved in the project were:
- Dr Jameel Marafie (Headlight AI): Co-founder and CEO
- Dr Puneet Chhabra (Headlight AI): Co-founder and CTO
- Julian Britton (Wessex Water): Critical Sewers Manager who initiated and secured funding for the project.
- Nathan Hand (Wessex Water): Project Manager throughout the project involved with planning and assessment.
- Richard Owen (Headlight AI): Computer Vision Engineer who was involved in the development, testing and deployment of both Telesto hardware and software.
- Dr Ujjar Bhandari (Headlight AI): Senior System Engineer who was involved in the development, testing and deployment of both Telesto hardware and software.
- Elliott Piercy (Headlight AI): Deep Learning Engineer who was involved in the development and testing of the visualisation and analytical features of Telesto software.
- Anthony Foden (Bright Innovations Group): Co-founder and Director of Bright IG, supplying the floating platform and conducting all the operations during project.
- Brad Commins (Bright Innovations Group): Co-founder and Director of Bright IG, supplying the floating platform and conducting all the operations during project.

The editor and publishers thank Dr Jameel Marafie, Co-founder and CEO at Headlight AI, and Dr Puneet Chhabra, Co-founder and CTO at Headlight AI, for preparing this article for publication.
For more information: Headlight AI | +44 (0)1273 121325 | www.headlight.ai
![]()